
Magnetic Levitation Control Trainer
Experiments:
Magnetic Levitation Control description
System modeling experiment and analysis
System open-loop response analysis
PID controller design
Root locus analysis and control
State space model and control
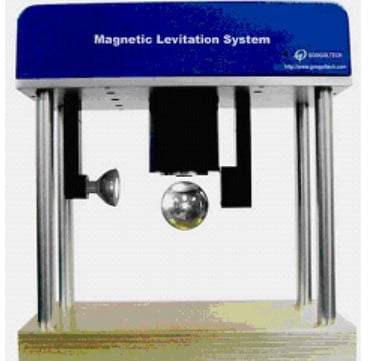
The Magnetic Levitation system is a classic Electro-mechanical experiment with interesting nonlinear dynamics and control challenges. The Magnetic levitation control trainer (IT-4428) is a single degree of freedom Electromagnetic based system which controls the magnetic field generated by an electromagnet to levitate a small magnetic ball vertically up and down in midair. The small magnetic ball levitates in the air indefinitely without any disturbance. The overhead electromagnet, wound in coil, generates an attractive force on the Magnetic ball that initially sits on the post. The total air gap or travel distance between the ball and the magnet (when its initially on the post) is 14 mm. The vertical position of the levitating magnetic ball is measured using a linear Hall effect sensor and the current in the electromagnet is controlled using a controller. The highly nonlinear relationship between the electromagnet and the ball, combined with the electromagnet’s own dynamic behavior, presents a complex control system. This complexity makes it an ideal platform for teaching control theory concepts like modeling, linerization, current control, position control, cascade control, and even more advanced strategies like multi-variable control, gain scheduling, and nonlinear control.
Category: Automation and Control Technology